|

|
|

"日 뛰어넘었다" 한국로봇에 세계가 '깜짝'
걷기·뛰기 넘어 춤까지 자유자재 진화한 휴보가 왔다한국형 휴머노이드 휴보2 오준호 KAIST 교수 개발무게 줄이고 뛰는 속도 향상, 40개 관절로 전신제어 가능"일 아시모 뛰어넘는 기술" 미·일·중 연구팀에 수출도
대덕=구본혁 기자 nbgkoo@sed.co.kr
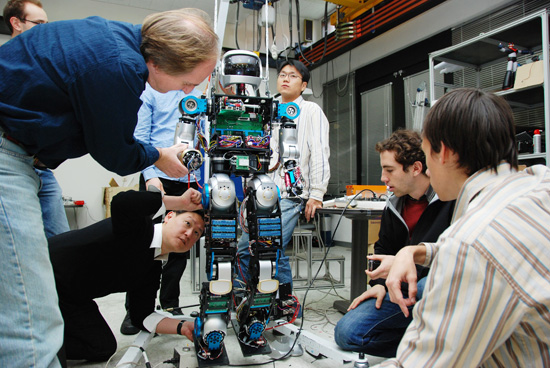
미국 로봇공학자들이 KAIST 휴보랩을 찾아 휴보2의 내부를 유심히 관찰하고 있다. /사진제공=KAIST
휴보2
인간과 상호작용할 수 있는 휴머노이드(humanoid)는 인류가 오랫동안 꿈꿔온 로망 중 하나다. 휴머노이드는 인간과 동일한 수준의 이족보행과 상호작용 능력을 바탕으로 인간을 대신하거나 인간과 협력해 다양한 서비스를 제공할 수 있다. 물론 아직까지 인공지능 고도화 등 해결해야 할 난제가 산적해 있지만 이미 휴머노이드는 계단을 오르내리고, 뛰고, 물건을 옮길 수 있는 수준까지 왔다. 세계적으로 유명한 휴머노이드로는 일본 혼다의 '아시모'가 있다. 오준호 KAIST 교수가 개발한 '휴보2'는 아시모를 뛰어넘어 춤까지 출 수 있는 휴머노이드로 해외 연구기관에 수출까지 된 최고 수준의 휴머노이드다.
▦휴보2, 춤추기 능력까지 갖춰=혼다의 아시모는 자타가 공인하는 현존 최강의 휴머노이드로 평가된다. 지난해 선보인 3세대 아시모는 시속 9㎞로 달리고 세계 최초로 자율행동제어기술을 채용해 주변 환경에 맞춰 스스로 판단하고 행동하는 수준에 도달한 상태다.
이 같은 아시모의 유일한 대항마로 손꼽히는 휴머노이드는 바로 KAIST 오준호 교수가 개발한 휴보다. 오 교수팀은 지난 2004년 처음 휴보를 개발한 후 그동안 쌓인 경험과 기술력을 결집해 최근 양산 개량형 휴보2를 내놓았다. 휴보2는 시스템적인 개선과 함께 움직이기ㆍ걷기ㆍ뛰기 등 성능에서도 상당한 진보를 이뤘다. 이는 미국ㆍ유럽 등 선진국 로봇공학자들도 아직 성공하지 못한 고난도 기술로 휴보2는 여기에 더해 춤을 출 수 있는 능력까지 갖췄다.
로봇은 무게중심이 흔들려서 조금이라도 균형을 잃으면 곧바로 쓰러질 수 있기 때문에 팔ㆍ다리와 상ㆍ하체를 제각각 이리저리 흔들어야 하는 춤은 엄청나게 어려운 도전과제다. 극도의 제어기술, 그것도 전신제어기술 없이는 구현이 불가능하다.
오 교수는 "혼다는 1986년 개발을 시작해 첫 번째 아시모가 발표된 1996년까지 10년간 무려 1억달러 이상을 투자했다"며 "휴보2는 아시모와 투자비와 개발기간, 지향하는 바가 달라 직접 비교의 의미가 크지 않지만 특정 부분에서만큼은 아시모 이상의 능력을 보유하고 있음은 분명한 사실"이라고 강조했다.
▦무게중심 제어가 관건=휴보2는 총 40개의 관절을 보유, 자유도(DOF) 40의 부드러운 몸동작을 구현한다. 이 덕분에 사람처럼 손목을 빙빙 돌릴 수 있으며 손가락 5개가 따로 움직일 수 있도록 설계돼 복잡한 형태의 물건도 떨어뜨리지 않고 자연스럽게 잡는다.
이전 모델이 신장 128㎝, 중량 55㎏의 몸집을 가지고 최대 시속 1.25㎞로 보행했던 데 비해 휴보2는 체중이 45㎏으로 날렵해졌고 최대 시속 3.6㎞로 뛸 수 있다. 보행속도도 일반 성인이 걷는 속도인 시속 1.8㎞로 향상됐다. 보폭은 최대 30㎝이며, 달릴 때는 1초에 3보 이상 발을 내딛는다.
휴머노이드 자체가 로봇공학의 정수이기는 하지만 안정적 보행 및 달리기 능력 부여를 위해 가장 중요한 기술은 균형 유지, 즉 무게중심의 제어다. 또 지면과 접촉하는 발도 매우 중요하다. 이 두 가지 요소에 따라 로봇의 걸음걸이 형태가 결정된다.
오 교수는 "휴보2가 한 번 뛸 때마다 20~30㎳(밀리초) 동안 공중에 떠 있다"며 "달리는 도중에도 계속해서 무게중심을 제어하는 것이 가장 어려운 기술로 아랫배 부분에 균형 센서를 탑재해 이 난제를 해결했다"고 설명했다.
발바닥의 경우 작은 고무패드를 붙여 안정성을 배가했다. 연구팀은 휴보의 걸음걸이가 안정적이지 못한 원인을 파악하던 중 평평해 보이는 바닥도 사실은 어느 정도 울퉁불퉁하다는 사실을 깨닫고 발목 센서의 민감성을 오히려 둔화시켜야 한다는 결론에 도달했다.
여기에 더해 휴보2가 좀 더 사람과 동일하게 걷고 달리도록 보행 알고리즘을 수정, 무릎을 펴고 걸을 수 있게 했다. 그래서 기존 휴보와 달리 걸을 때 다소 엉거주춤한 모습이 사라졌다.
또 경량화를 위해 프레임의 기초설계부터 다시 시작하는 가장 확실한 방법을 택했다. 10㎏이나 되는 대폭적인 다이어트의 성공은 이 같은 노력의 산물이다. 관절에 들어가는 서보모터 역시 직류(DC) 모터에서 BLDC 모터로 대체해 소형화와 토크 향상을 꾀했다.
▦양산은 물론 수출까지=휴보2는 아시모와 지향점이 다르다. 아시모가 일종의 기술력 과시와 혼다라는 기업 이미지 제고를 위한 존재라면 휴보2는 휴머노이드 연구용 플랫폼으로 활용하기 위해 개발된 모델이다. 때문에 아시모와 달리 플랫폼 자체가 완전히 오픈돼 있다.
오 교수는 해외에 휴보를 임대ㆍ판매하는 레인보우라는 기업도 직접 설립했다. 오 교수는 "지금까지 휴보2의 양산모델인 '휴보2 플러스'를 총 15대 생산했다"며 "대당 약 4억원의 제작비가 들어가는데 이 중 4대는 국내 휴머노이드 연구팀에, 11대는 미국ㆍ일본ㆍ싱가포르ㆍ중국 등 해외 연구팀에 수출하는 성과를 올렸다"고 설명했다.
현재 오 교수팀은 휴보2의 안정성과 완성도를 더욱 높이는 연구에 주력하고 있다. 시스템이 워낙 복잡한 탓에 세계 각국의 다양한 환경에서 활용되던 중 종종 예기치 못한 문제가 발생하고 있기 때문이다.
오 교수는 "현재 연간 3억5,000만원의 예산을 받아 로봇 연구에 사용하고 있다"며 "만일 연간 20억원 정도의 예산만 지원받을 수 있다면 다각적 협력연구를 통해 훨씬 향상된 성과를 도출할 수 있을 것"이라고 말했다.
휴머노이드 연구의 플랫폼으로 휴보가 갖는 가치는 해외에서 더 큰 인정을 받고 있다. 미 국가과학재단(NSF)이 연구용으로 임대하기도 했을 정도다. NSF는 휴보를 활용해 다국간 휴머노이드 협력연구에 참가하는 학생들의 교재로 사용하고 있다. 그 대가로 KAIST에 5년간 연간 8만달러, 총 40만달러의 연구비를 지원하고 있다.
특히 NSF는 연구의 효용성 증대를 위해 버지니아공대ㆍ펜실베이니아대ㆍ드렉셀대ㆍ브린마워대ㆍ콜비칼리지 등으로 구성된 국제공동연구팀에게 자금을 지원하고 학술 목적으로 사용할 버추얼 휴보, 미니 휴보, 온라인 휴보 등 3종의 휴보를 개발하기도 했다.









