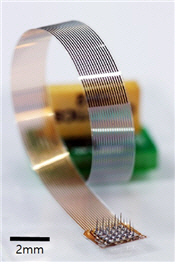
 김소희 교수 연구팀이 개발한 신경전극. 말초신경에서 고해상도 신경신호를 측정할 수 있다./사진제공=DGIST
김소희 교수 연구팀이 개발한 신경전극. 말초신경에서 고해상도 신경신호를 측정할 수 있다./사진제공=DGISTDGIST 연구팀이 말초신경에서 신경신호를 측정하는 신경전극과 이를 활용한 인터페이스 기술을 개발했다. 사용자의 의도대로 움직이고 감각도 느낄 수 있는 로봇 팔, 다리 등의 개발에 활용할 수 있을 것으로 기대된다.
대구경북과학기술원(DGIST)은 로봇공학전공 김소희 교수 연구팀이 말초신경의 신경신호를 고해상도로 측정할 수 있는 말초신경 인터페이스 기술을 국내 최초로 개발했다고 20일 발표했다. 뇌가 아닌 말초 신경에서 활동전위를 개별 신경세포 수준에서 고해상도로 측정에 성공한 세계적으로도 드물다.
말초신경은 뇌에서 발생한 신호를 신체의 다른 부위로 내려 보내거나, 신체의 말단에서 느낀 감각 신호를 뇌로 올려 보내는 역할을 한다. 말초신경은 신경세포 핵에서 뻗어 나온 축삭(axon) 다발로 전선 다발과 같은 원통형 구조로, 그 표면에 전극을 안정적으로 밀착시키기 어려워 신호 측정이 뇌에서의 신경 신호 측정보다 까다롭다. 또한, 팔이나 다리에 분포한 말초신경은 근육 속에 파묻혀 있어 신경 전극을 신경 표면에 안정적으로 고정되기 어렵고, 근육이 수축할 때 발생하는 근육세포 신호로 인해 말초 신경 신호만을 정확하게 측정하기가 쉽지 않다.
이러한 문제점을 해결하기 위해 김소희 교수 연구팀은 유연성이 있으면서도 바늘처럼 생겨 침습이 가능한 신경 전극을 개발해 말초 신경의 표면에 밀착될 수 있게 했다. 연구팀은 이를 활용해 대퇴부 신경을 따라 흐르는 신경신호를 장기간에 걸쳐 고해상도로 측정하는데 성공했다.
말초신경 인터페이스 기술은 인체와 결합 가능한 로봇 팔, 다리, 자연스러운 움직임이 가능한 최첨단 의수, 의족 등의 개발에 필요한 핵심기술이다. 신경 전극을 통해 자극 신호를 신경 세포로 역으로 주입할 수도 있어 의수, 의족에 가해진 촉감, 온도 등의 감각까지도 느끼게 할 수 있다.
김소희 교수는 “본인의 팔, 다리를 움직이는 것처럼 자연스러운 움직임을 구현하는 로봇 팔, 다리 등의 개발로 이어질 수 있도록 후속 연구를 이어갈 계획”이라고 말했다.
미래창조과학부 중견연구자지원사업과 DGIST 미래 선도형 특성화 연구사업 및 미래 브레인프로그램의 지원으로 수행된 이번 연구 결과는 국제 학술지 ‘저널 오브 뉴럴 엔지니어링’ 14일자 온라인판에 게재됐다.
 김소희 DGIST 로봇공학 전공 교수/사진 제공=DGIST
김소희 DGIST 로봇공학 전공 교수/사진 제공=DGIST