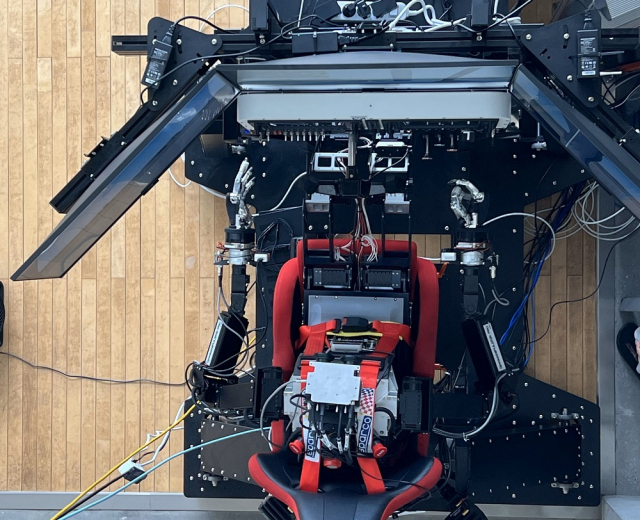
 비행시뮬레이터에 탑승한 파이봇. 사진제공=KAIST
비행시뮬레이터에 탑승한 파이봇. 사진제공=KAISTKAIST에 휴머노이드 파일럿 ‘파이봇(Pibot)’이 등장해 화제다.
KAIST는 KAIST 심현철 교수와 주재걸·윤국진·김민준 교수가 참여한 공동연구팀이 자연어로 기술된 매뉴얼을 이해하고 이를 기반으로 비행기를 직접 조종이 가능한 인간형 로봇을 개발했고 이를 실용화할 계획이라고 19일 밝혔다.
공동연구팀은 일반적인 언어로 작성된 조종 매뉴얼을 읽고 이해하는 ‘자연어 처리기반 인간형 조종사 로봇 개발’ 미래도전과제의 지원을 기반으로 인공지능과 로보틱스 기술을 적용해 인간형 로봇이 실제 항공기 조종석에 착석해서 기존 항공기를 전혀 개조하지 않고 착석한 다음, 조종석의 다양한 장치들을 직접 조작해 비행하는 방식을 선보였다. 기존 항공기의 자동비행장치(오토파일럿)나 무인 비행만 가능한 무인항공기와는 근본적인 차이가 있다.
연구진이 개발중인 조종사 로봇은 인간 조종사에게는 불가능한 전세계 항공차트(Jeppson Chart)를 전부 기억해 실수없는 조종이 가능하며 특히 최근 큰 이슈가 된 ChatGPT 기술을 활용해 항공기 조작 매뉴얼 및 비상 대처절차를 담은 자료(QRH)를 기억, 즉각적으로 대응할 수 있고 항공기의 비행 상태를 기반으로 실시간으로 안전한 경로를 계산할 수 있어 인간 조종사보다 훨씬 빠르게 비상 상황에 대처하는 것이 가능하다.
또한 기존 로봇이 고정된 위치에서 반복적인 작업만 가능한 것에 비해 조종사 로봇은 장착된 카메라로 조종석 내부 및 항공기 외부 상황을 파악하고 조종간의 각종 스위치들을 정확하게 조작하는 것이 가능하며 고정밀 강인 제어 기술을 적용해 진동이 심한 항공기 내부에서 정확한 로봇 팔 및 손 제어가 가능하다.
조종사 로봇은 현재 비행 조종 시뮬레이터에서 항공기의 시동부터 택싱, 이착륙, 순항, 주기 등 모든 조작을 수행하고 있고 연구팀은 조종사 로봇을 실제 경비행기에 적용해 항공기를 직접 조종하여 검증할 계획이다.
과제 책임자인 심현철 교수는 “인간형 조종사 로봇은 기존의 항공기들을 전혀 개조하지 않고 즉각적으로 자동 비행이 가능해 실용성 및 활용성이 매우 높고 항공기뿐만 아니라 자동차, 장갑차 등 다양한 장치의 조작도 가능해 병력자원 고갈이 심각한 현 상황에 매우 유용하게 적용될 수 있을 것으로 기대한다”고 말했다.
개발 완성 시점은 2026년이며 민간 및 군용 활용을 목적으로 사업화 방안도 모색중이다.