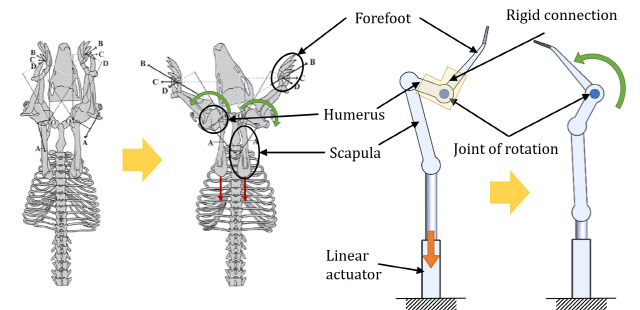
강력한 앞발로 땅을 파헤쳐 잔해를 치우는 휴머럴로테이션 두더지의 골격(왼쪽)과 이를 모방한 몰봇의 잔해제거부 설계(오른쪽)을 소개한 그림/자료제공=KAIST
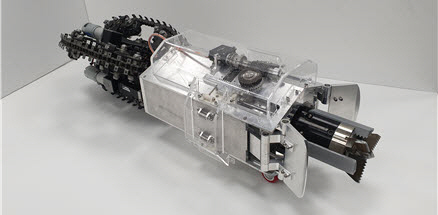
명현 KAIST 교수팀이 여러 종류 두더지들의 장점을 모아 개발한 굴착용 로봇/사진제공=KAIST
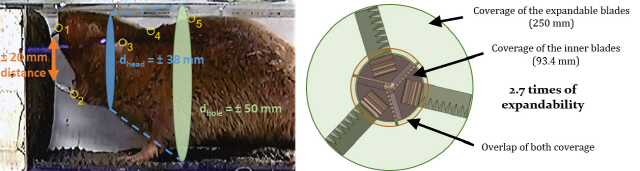
이빨로 빠르게 땅을 긁어 파는 치젤 투스 두더지(왼쪽)와 이를 모방한 명현 교수팀의 몰봇 드릴링 부분 소개 이미지/자료제공=KAIST
두더지 로봇을 개발한 명현(맨왼쪽) KAIST교수의 연구팀/사진제공=KAIST