다관절 유지보수 로봇… <br>우주비행사들의 우주 유영 임무 최소화
[서울경제 파퓰러사이언스] 집에서 두꺼비집의 퓨즈를 교체하거나 다 쓴 전구를 바꿔 끼우는 일은 그다지 어렵지 않다.
하지만 지구 궤도를 따라 빠른 속도로 회전하는 우주선 외부에 걸터앉아 이 같은 일을 해야 한다면 어떨까?
이는 아마 전혀 다른 얘기가 될 것이다.
현재 국제우주정거장(ISS)에 거주하고 있는 우주비행사들에게는 이처럼 위험한 우주 공간에서의 작업이 아주 일상적인 일이다.
1,000억 달러가 넘는 ISS를 최상의 상태로 보존하기 위해서는 지속적인 유지보수가 필수적이기 때문이다.
이로 인해 우주비행사들은 우주의 비밀을 밝혀내기 위한 연구에 매진하는 것과 거의 동일한 시간을 위험천만한 ISS의 유지보수에 소비하고 있을 정도다.
하지만 앞으로는 ISS 거주자들의 위험 부담이 한층 줄어들 전망이다.
우주 유영을 통한 기존의 유지보수 작업을 대신해 줄 첨단 원격조종 로봇이 곧 ISS에 장착될 것이기 때문이다.
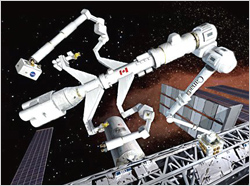
‘덱스터(Dextre)’로 명명된 이 로봇은 캐나다 우주국(CSA)이 4년간 총 2억 달러(1,875억원)를 투자해 개발한 특수 목적용 수리 전문 로봇으로 CSA가 ISS에 설치 중인 이동형서비스시스템(MSS) 모듈의 마지막 구성요소다.
MSS는 크게 캐나담 2(Canadarm 2)라고 불리는 18m 길이의 로봇 팔과 이를 ISS의 주요 부위로 보낼 수 있는 레일로 구성돼 있는데, 덱스터가 바로 이 캐나담 2의 끝부분에 장착돼 실질적인 유지보수 임무를 수행하게 되는 것.
구체적으로 CSA는 덱스터의 능력 극대화를 위해 회전이 가능한 몸체에 7개의 관절을 지닌 두개의 팔을 부착하는 형태로 설계했다.
또한 각 팔의 끝에는 집게 모양의 로봇 손을 별도로 부착했다.
이로 인해 덱스터는 ISS의 복잡한 구조물 사이를 헤치며 어떤 각도에서도 임무 완수가 가능하다.
고장 부위가 레일에서 다소 떨어져 있더라도 하나의 팔로 ISS를 붙잡고 나머지 한 팔을 길게 뻗는 방식으로 대처할 수 있다.
현재 캐나다 라발대학교에서 지금의 두 손가락 로봇 손을 대체할 다섯 손가락의 다관절 로봇 손을 개발 중에 있어 향후 덱스터의 정밀성은 수작업에 버금가는 수준으로 향상될 전망이다.
물론 덱스터라고 해서 만능은 아니다.
ISS에 고정된 채 운용되는 장비인 만큼 지난해 11월의 태양열 전지판 보수작업처럼 레일로부터 너무 멀리 떨어진 부위에서는 무용지물이 된다.
역사상 가장 위험한 우주 유영으로 손꼽혔던 이 임무는 우주비행사 스콧 파라진스키가 수행했는데, 당시 그는 100V 이상의 전기가 흐르는 태양열 전지판으로 날아가 부서진 조각을 수리한 바 있다.
덱스터 프로젝트의 수석 엔지니어인 CSA의 다니엘 레이 박사는 “덱스터 탑재 이후에도 우주비행사들의 우주 유영 작업이 완전히 사라지지는 않을 것”이라며 “하지만 그동안 어쩔 수 없이 감내해왔던 수많은 위험요인들을 최소화할 수 있다”고 강조했다.
ISS 거주자들에게 최고의 신년 선물이 될 덱스터는 내달 중 미국 우주왕복선 엔데버호에 실려 케네디우주센터를 출발할 예정이다.