
감각기능을 갖춘 의수 구현에 필요한 고출력 경량의 인공근육으로 작동하는 생체근육형 구동기를 성균관대학교 최혁렬 교수 연구팀이 개발했다.
기존의 기계형 팔과 손 등에 사용되는 모터형 구동기는 크기와 힘에 한계가 있었다. 무게가 무거우며, 상하·좌우 운동으로 움직임이 단조롭다는 단점이 있었다.
세계 최초로 개발된 인공근육형 구동기는 가벼운 나일론과 여러 섬유를 혼합하여 만든 고무와 같이 신축성이 있는 합성섬유 스판덱스(Spandex)섬유를 꼬아서 제작한 것으로 기존 모터형에 비해 높은 힘을 낼 수 있다. 또한, 우수한 강도와 인성(靷性)을 갖춘 근골격으로 움직임이 훨씬 자유롭다는 장점을 가진다.
또한, 신축성이 뛰어난 직물로 직조가 가능하고 동시에 생체근육과 유사한 수축·이완 및 회전운동이 가능해 절단환자용 의수·의족뿐만 아니라 착용형 기기나 인공지능 로봇 등에도 크게 활용될 수 있을 것으로 기대된다.
이번 성과로 2019년을 목표로 하고 있는 인공피부, 피부형 촉감 감지기(센서) 등 요소기술 융합으로 감각기능을 갖춘 바이오닉 손 · 팔 개발에 한 발짝 더 다가서게 되었다.
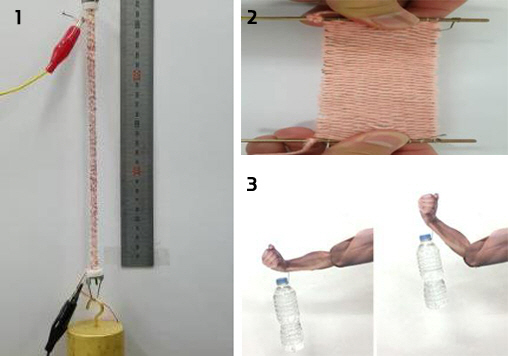
1. 인공근육 파이버 제작 과정과 구동원리
2. Spandex 원사로 제작한 인공근육 실(wire)
3. 인공근육으로 움직이는 팔 모형
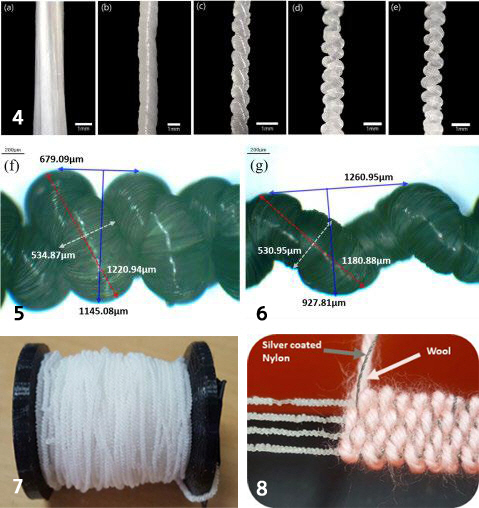
4. 인공근육 실로 직조하는 과정
5. 인공근육으로 작동하는 손 골격
6. 인공근육 실로 직조한 원통형 인공근육 구동기
7. Spandex 원사로 제작한 인공근육 실(wire)
8. 인공근육 실로 직조한 인공근육 천(fabric)
인공근육 구동기는 인간의 움직임을 모사하는데 있어서 가장 핵심적인 요소 기술이지만 아직까지도 사용하기에 적절한 인공근육 구동기의 기술은 개발되지 않았다. 현존하는 구동기들은 대부분(97%이상) 0.1~1 kg 중량의 범위에서 감속기를 포함한 DC 모터들로 사용되고 이 모터들은 대체로 ~100 W의 출력을 낼 수 있다.
하지만 약 300 W/kg 의 비출력을 내는 포유류의 근육을 생각하면 낮은 수준이며, 모터 고유의 거대한 부피와 부족한 유연성은 생체 근육과 같은 인공근육 구동기로는 적합하지 않다. 본 연구에서는 인간의 근육/근섬유의 구조와 구동 메커니즘을 규명하여 인공근육에 적합한 Active 유연 소재와 구조를 선정하고, 이를 기반으로 생체모방 인공 근섬유 구동기를 개발하였다.
생체 근육을 능가하는 고변위/고출력의 인공근육형 구동기를 위해 인공근육 파이버와 이를 직조(weaving)하여 다양한 형태의 인공근육 구동기를 개발하였다. 본 연구진은 경량의 신축성 섬유(spandex 원사)를 사용하여 dual-twisting을 통하여 인공근육 파이버를 쉽게 제작할 수 있는 최적의 공정기술, 장치를 개발하였다. 더욱이 섬유로 제작된 인공근육 구동기를 실제 근육과 같이 다발형태로 묶는 기술과 옷감과 같은 직물 형태로 제작 하는 기술 또한 개발하였다. 본 연구진은 이 기술을 통해 제작된 다발형태의 근육을 팔, 골격 모형에 적용하여 사람의 움직임을 모사할 수 있음을 확인하였다. 또한 개발된 인공근육 구동기는 전극물질이나 열선을 활용해 전기 구동이 가능하기 때문에 기존의 전자회로로 쉽게 제어가 가능하다.
개발된 인공근육 구동기는 유연하면서도 우수한 구동성능(<35%이상 구동)을 보여주며 이는 세계 최고 수준이다. 경량의 신축성 섬유로 제작되어 모듈화 혹은 직물로 직조가 가능해 절단환자용 의지(의족, 의수)는 물론, 착용형 로봇, 차세대 의류에도 충분히 활용될 수 있을 것으로 기대된다.
서울경제 파퓰러사이언스 편집부 / 정승호 기자 saint096@naver.com









