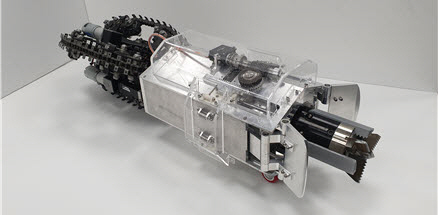
 명현 KAIST 교수팀이 여러 종류 두더지들의 장점을 모아 개발한 굴착용 로봇/사진제공=KAIST
명현 KAIST 교수팀이 여러 종류 두더지들의 장점을 모아 개발한 굴착용 로봇/사진제공=KAIST세계에서 가장 빨리 땅을 파고 들어갈 수 있는 두더지 로봇인 ‘몰봇’(Mole-bot·사진)이 우리나라 연구진에 의해 개발됐다. 광물자원탐사 및 우주탐사 등에 활용될 수 있을 것으로 기대된다.
한국과학기술원(KAIST)은 본원의 미래도시 로봇연구실 소속 명현 교수 연구팀이 여러 두더지 종류의 장점들을 모방한 몰봇을 개발했다고 4일 밝혔다. 굴착을 위해 필요했던 시추기, 펌프, 파이프라인 등 여러 장비 없이도 이번 몰봇 하나로 해결된다.
이번 로봇은 이빨로 토양을 긁어내는 ‘치젤 투스 두더지’를 모방해 드릴링 안정적인 굴착 성능을 낸다. 강력한 앞발로 땅을 판 잔해를 치우는 ‘휴머럴 로테이션 두더지(Humeral rotation mole)’도 모사해 굴착잔해를 효율적으로 제거한다. 또한 좁은 굴 속에서도 자유롭게 몸통을 좌우회전시킬 수 있다. 땅 속에서도 지구의 자기장을 센서로 읽어 현재의 위치를 파악한다.
굴진속도면에선 시속1.46m를 기록해 기존의 세계 최고 방식 대비 3배 이상 빨랐다. 최대 굴진각은 100피트(ft)당 38도다. 명 교수팀은 이번 로봇 개발과정에서 3건의 특허출원 및 1건의 특허등록 성과를 냈다.









