2년의 일정으로 펼쳐진 ‘다르파 로보틱스 챌린지(DRC)’에는 전 세계 다양한 팀들이 참가했다. 미 국방부는 이들 팀 가운데 일부에겐 수백만 달러 짜리 로봇을 제공해 프로그래밍을 하게 하고, 나머지에겐 자금을 제공해 로봇을 자체개발하게 했다. 하지만 시간과 자원을 풍부하게 줬음에도 DRC의 난이도는 극심하게 높은 수준이었다. 출품된 로봇 대다수는 다리가 달린 보행로봇이었는데, 안정성이 매우 떨어져 평지를 걷기에도 어려운 수준이었다. 때문에 대부분의 참가팀들은 DRC의 우승보다 살아 남는 것이 우선적인 목표였다.
DRC의 결선은 지난해 6월 캘리포니아주 포노마에서 열렸다. 그리고 쉽게 예상할 수 있듯 많은 로봇들이 이틀간 펼쳐진 미션 수행 과정에서 고철로 실려 나갔다. 쓰러지는 일은 다반사였고, 그때마다 관중석 수천 명의 참관자들이 자신의 일처럼 탄식을 쏟아냈다. 어떤 휴머노이드는 너무 세게 넘어져 머리가 분리되기도 했다.
결국 1시간 내에 8가지 임무를 완수한 3개 팀이 총 350만 달러 상금의 주인공이 됐다. 이번 DRC의 진정한 가치는 로봇 개발의 촉매제 역할을 했다는 사실이다. 이 대회 덕분에 세계 최고 로봇공학자들이 재난대응로봇 분야의 최대난제에 도전할 수 있었기 때문이다. 물론 앞으로 다가올 대재해에 즉시 투입할 수 있을 만큼 완성도 높은 로봇을 만든 팀은 없었다. 하지만 어려움에 빠진 사람들을 구하고 노인을 돕는 등 인간 세상에서 활약할 수 있는 로봇이라는 꿈이 한 발짝 현실로 앞당겨졌다는 사실 만큼은 분명하다.
 DRC-휴보2는 최종 결선에서 8개의 미션을 수행하는 동안 한 번도 넘어지지 않은 유일한 로봇이다.
DRC-휴보2는 최종 결선에서 8개의 미션을 수행하는 동안 한 번도 넘어지지 않은 유일한 로봇이다.▲ DRC-휴보2
DRC-HUBO2
KAIST, 레인보우
대한민국의 휴머노이드 로봇 ‘DRC-휴보2’가 우승상금 200만 달러의 주인공이 됐다. 뛰어난 손재주 외에도 족보행과 바퀴주행이 모두 가능한 기동성을 기반으로 경쟁자들을 압도했다. 특히 휴보는 차량 하차 미션에서 SUV의 롤케이지를 붙잡고 신속히 하차에 성공했다. 반면 다른 로봇들은 하차 속도가 늦거나 하차를 시도하던 중 망가지거나 아예 미션을 포기했다.
신장 168㎝ ● 체중 80㎏

▲ 로보시미언
RoboSimian
NASA 제트추진연구소(JPL)
NASA는 이 로봇을 영장류에서 영향을 받아 개발했다고 주장한다. 하지만 기능이나 외관에서 포유류적인 특징조차 찾아보기 어렵다. 예컨대 이 로봇의 사지는 각각 28개나 되는 관절을 갖고 있다. 때문에 그 유연성이 오랑오탄보다는 문어 쪽에 훨씬 가깝다. 로모시미언은 8개 미션 중 계단 오르기를 제외한 7개를 완수하며 5위를 차지했다.
신장 70㎝ ● 체중 125㎏
▲ 조니 05
Johnny 05
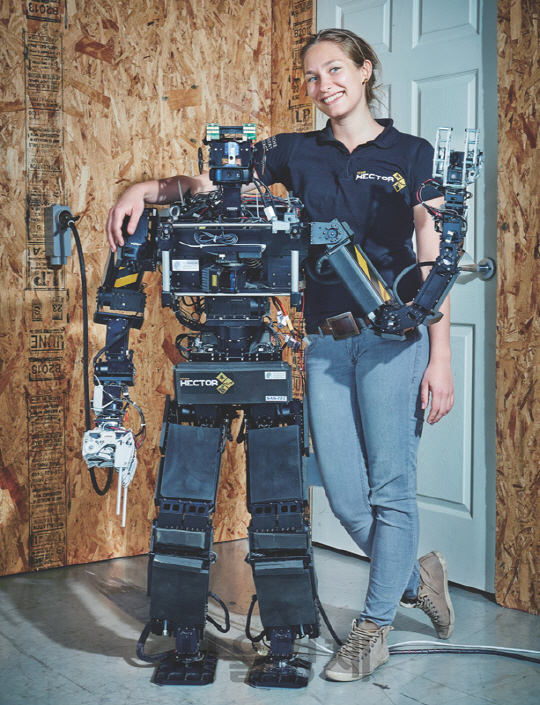
다름슈타트공대
상금이 성패를 가늠하는 요소이기는 했지만 DRC는 기본적으로 협력에 기반하고 있다. 독일 다름슈타트공대 헥토르 팀의 ‘조니 05’가 좋은 실례다. 이 로봇의 소프트웨어와 하드웨어는 장래의 라이벌이 될 수도 있는 4명의 박사급 연구자가 힘을 합쳐 완성한 결실이기 때문이다. 특히 이들은 자신의 작업결과를 인터넷에 무료 오픈소스 코드로 올려놓았다.
신장 147㎝ ● 체중 55㎏

▲ 에셔
ESCHER
버지니아공대
이 로봇의 기술적 하이라이트는 ‘인공근육 액추에이터(SEA)’에 있다. 스프링이 내장된 SEA 덕분에 에셔는 걸음을 걸을 때마다 운동에너지를 압축, 회수해 재사용한다. 이는 인간의 관절이 가진 효율과 충격 흡수능력을 모방한 것으로, 보행에 소비되는 에너지의 절감이 가능하다.
신장 178㎝ ● 체중 75㎏

▲ 워크맨
Walk-Man
이탈리아기술연구소(IIT), 피사 대학
DRC 참가팀 대부분은 이족보행 휴머노이드를 출품했다. 자동차 운전, 문 열기, 전동공구 사용 등 모든 미션의 초점이 인간의 일을 대신하는 것에 맞춰져 있었기 때문이다. 다만 이족보행 로봇은 이동 중 균형잡기가 매우 어렵다. 때문에 워크맨 팀은 로봇이 넘어질 것에 대비해 돌출부위에 충격흡수패드를 부착했다. 실제로도 이 로봇은 ‘문 열고 들어가기’ 미션에서 넘어지며 팀원들을 놀라게 만들었다.
신장 185㎝ ● 체중 120㎏

▲ 플로리안
Florian
VIGIR 팀
DRC에는 하드웨어의 개발 없이 보스턴 다이내믹스의 이족보행 휴머노이드 ‘아틀라스(Atlas)’를 활용, 소프트웨어만으로 경쟁하는 7개팀도 참가했다. 다름슈타트공대, 버지니아공대, 코넬대학 등 6개 연구팀의 연합팀인 VIGIR팀이 출품한 플로리안도 그중 하나다. 사소한 하드웨어의 개조는 허용됐지만 공동 연구팀의 핵심 도전과제는 키가 2m에 가까운 이 로봇이 평탄하지 않은 지면을 걷다가 넘어지지 않도록 소프트웨어를 개발하는 것이었다.
신장 193㎝ ● 체중 160㎏
레인보우 - KAIST 휴보랩의 창업 벤처기업. 해외에 휴보를 임대·판매하는 사업을 영위하고 있다.
롤케이지 - 차량이 뒤집혔을 때 탑승자를 보호하기 위해 설치한 관 모양의 강철로 된 안전장치
SEA - Series Elastic Actuator.
서울경제 파퓰러사이언스 편집팀









