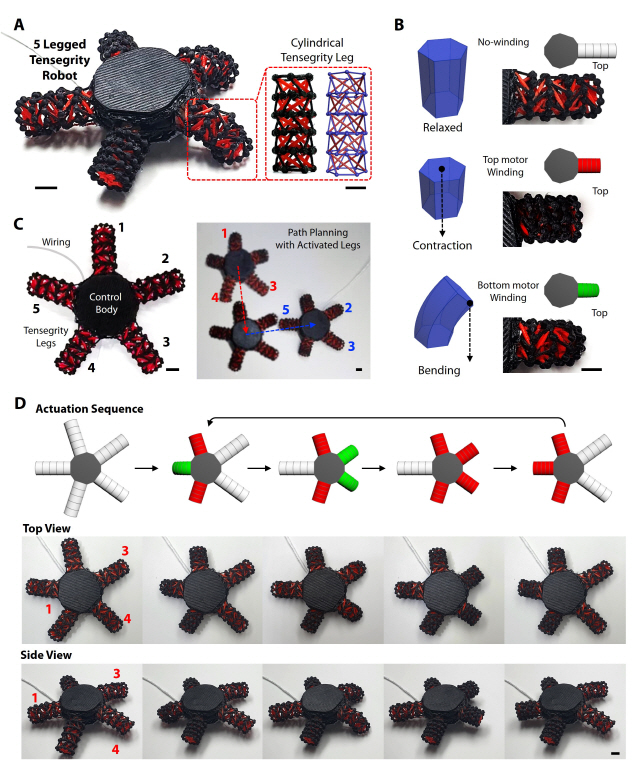
 불가사리 로봇의 형태와 거동. (A) 불가사리 로봇과 그 다리를 이루는 텐세그리티 구조. (B) 불가사리 로봇의 다리가 만들어내는 3가지 동적 상태. (C) 불가사리 로봇의 방향 전환 거동. (D) 불가사리 로봇의 거동 순서를 나타낸 3D 이미지, 상면사진, 측면사진. /사진제공=UNIST
불가사리 로봇의 형태와 거동. (A) 불가사리 로봇과 그 다리를 이루는 텐세그리티 구조. (B) 불가사리 로봇의 다리가 만들어내는 3가지 동적 상태. (C) 불가사리 로봇의 방향 전환 거동. (D) 불가사리 로봇의 거동 순서를 나타낸 3D 이미지, 상면사진, 측면사진. /사진제공=UNIST가볍고 견고한 건축물에 쓰이는 구조를 응용해 로봇을 만드는 기술이 개발됐다.
울산과학기술원(UNIST) 신소재공학부의 김지윤 교수팀은 유연하면서도 강인한 ‘소프트 로봇’ 제작 기술을 개발했다고 27일 밝혔다.
건축물에 쓰는 복잡한 텐세그리티 구조를 쉽게 구현할 수 있는 방법을 고안해 움직일 수 있는 ‘불가사리’ 로봇을 제작하는데 성공했다. 텐세그리티 구조는 무게를 견딜 수 있는 ‘강인한 재료’와 실처럼 팽팽하고 ‘유연한 재료’가 씨줄과 날줄처럼 엉켜 있는 구조다. 적은 재료로 강한 강도, 유연성을 얻을 수 있다는 장점이 있어 건축물에 주로 쓰인다.
텐세그리티 구조는 서로 다른 특성을 갖는 물질들이 공중에서 연결된 구조라 일반적인 3D 프린팅 제작 기법을 이용해 이 구조가 적용된 로봇을 만들기 힘들다. 연구팀은 3D 프린팅 기법과 물에 녹을 수 있는 수용성 희생틀을 이용해 복잡한 텐세그리티 구조를 구현하는 방법을 고안했다. 3D 프린터를 이용해 큰 하중을 견딜 수 있는 재료(압축재)와 희생틀을 프린팅 한 뒤, 희생틀 내부에 유연한 재료(인장재)를 삽입하는 방식이다. 희생틀은 물에 녹기 때문에 쉽게 제거 할 수 있다.
제1저자인 이하준 연구원은 “3D 프린팅이라는 대표적인 상향식 제품 제작법과 ‘식각’이라는 하향식 제작법을 접목해 복잡한 텐세그리티 구조를 쉽게 구현 할 수 있었다”고 설명했다.
연구진은 개발된 구조체 제작방식과 설계 기법을 이용해 정육면체(cube), 도넛(toroid), 삼각기둥(prism) 등 다양한 형상의 텐세그리티 구조를 제작했다. 또 만들어진 텐세그리티 구조체를 기본 모듈로 사용해 5개의 다리가 달린 전기로 구동하는 불가사리 로봇을 조립했다. 텐세그리티 구조를 적용했기 때문에 앞으로 걷거나 움직이는 방향을 바꾸는 동작이 가능하다. 여기에 외부 자극으로 ‘스스로 움직이는’ 스마트 소재를 적용하면 스스로 움직는 불가사리 로봇도 만들 수 있다. 실제로 스마트 자성 소재를 적용해 스스로 움츠렸다 펴졌다는 불가사리 로봇도 제작했다.
김지윤 교수는 “텐세그리티 구조의 특성을 이용하면 ‘재료’ 만으로는 만들기 어렵고 자연계에 존재하지 않는 독특한 기계적 물성을 갖는 다양한 메타 구조체를 만들 수 있다”고 설명했다.
그는 이어 “이번 연구는 복잡한 텐세그리티 구조를 쉽고 빠르게 원하는 형태로 구현 가능한 기법을 개발했다는데 의의가 있다”며 “다양한 형상과 기능을 갖는 유연하고 강인한 블록을 쉽게 만들 수 있어 소프트 로봇 개발에 큰 도움이 될 것”이라고 기대했다.
 유연하면서도 강인한 소프트 로봇 제작 기술을 개발한 김지윤 교수(좌측)과 제1저자인 이하준 연구원(중앙). /사짅공=UNIST
유연하면서도 강인한 소프트 로봇 제작 기술을 개발한 김지윤 교수(좌측)과 제1저자인 이하준 연구원(중앙). /사짅공=UNIST이번 연구는 로봇 분야의 가장 권위 있는 학술지인 사이언스 로보틱스(Science Robotics)에 8월 26일자로 온라인 게재됐다.