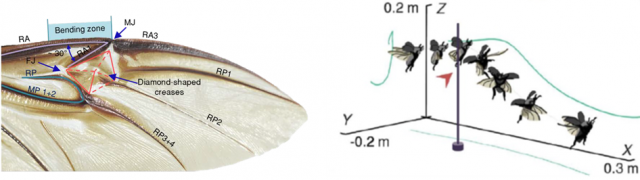
 장수풍뎅이 뒷날개의 충돌 에너지 흡수 구조(왼쪽)와 날개 바깥쪽이 장애물과 충돌했을 때 장수풍뎅이의 비행 모습(오른쪽).
장수풍뎅이 뒷날개의 충돌 에너지 흡수 구조(왼쪽)와 날개 바깥쪽이 장애물과 충돌했을 때 장수풍뎅이의 비행 모습(오른쪽).곤충은 항공기는 물론 조류와도 다른 원리로 비행한다. 꼬리날개가 없어 날갯짓만으로 비행에 필요한 공기력과 자세 유지에 필요한 제어력을 낸다. 큰 양력을 발생하는 것도 특징이다. 하지만 곤충을 모방해 내부에 장착된 배터리로 5분 이상 제어 비행에 성공한 날갯짓 비행 로봇은 아직 세계적으로도 드물다. 미국 항공우주국(NASA·나사)이 화성에서 날갯짓 비행이 아닌 서로 반대 방향으로 빠르게 회전하는 한 쌍의 날개를 가진 회전익 무인기를 실험하는 것도 이 때문이다.
과학기술정보통신부가 주최하고 한국연구재단과 서울경제가 공동 주관하는 ‘이달의 과학기술인상’ 8월 수상자로 선정된 박훈철(59·사진) 건국대 스마트운행체공학과 교수는 장애물과 충돌해도 추락하지 않는 장수풍뎅이를 모방한 날갯짓 비행 로봇을 개발했다. 달이나 화성 등 우주 저밀도 대기에서 비행 가능한 미래 항공우주 기술의 기반을 마련한 것이다.
 박훈철 건국대 교수가 연구실에서 연구원과 함께 연구에 관해 논의하고 있다.
박훈철 건국대 교수가 연구실에서 연구원과 함께 연구에 관해 논의하고 있다.그는 지난 2005년 미국에서 열린 항공우주학회 참가를 계기로 생체 모방 기술에 관해 영감을 받았다. 이후 건국대 호숫가를 산책하다가 접한 곤충의 날개가 아무런 근육이 연결돼 있지 않은 데도 날개를 접었다 펴면서 비행이 가능한 것을 눈여겨보기 시작했다. 특히 평소 날개를 여러 번 접어 숨겨뒀다가 비행할 때만 날개를 펴는 장수풍뎅이에 주목하게 된다. 하지만 야행성인 장수풍뎅이를 디지털 초고속 카메라로 촬영할 때 밝은 광원으로 인해 장수풍뎅이가 날지 않아 인내심을 발휘했고 특정 방향으로 날게 하려고 다양한 아이디어를 동원하기도 했다.
그 결과 박 교수팀은 장애물과 충돌해도 추락하지 않고 정찰과 탐사 임무를 수행할 수 있는 곤충 모방 날갯짓 로봇을 개발했다. 그는 “연구 초기 장수풍뎅이처럼 날갯짓을 180도 이상 안정적으로 할 수 있는 모터 구동형 날갯짓 장치를 발명하고 되먹임 전자제어 기술 개발에 주안점을 뒀다”며 “이후 강태삼 건국대 기계항공공학부 교수팀의 협조를 얻어 2019년 곤충 모방 날갯짓 비행 로봇인 ‘KU비틀’을 개발해 약 9분간 비행할 수 있었다”고 소개했다. 이는 그동안 낮은 대기 밀도에서 비행이 가능한 곤충 모방 로봇을 개발하려는 시도가 많았지만 곤충의 비행 방법을 기술적으로 구현하기 어려워 장시간 비행에 성공한 사례가 드물었던 것에 비해 상당히 진전된 연구다.
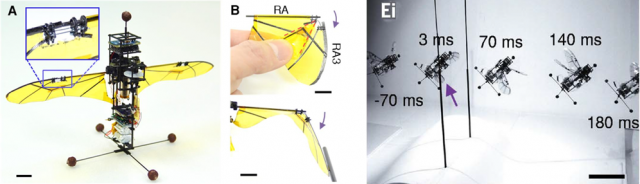 충돌 에너지 흡수장치를 부착한 날개를 가진 곤충 모방 날갯짓 비행 로봇인 KU비틀(왼쪽)의 장애물 충돌 전후 비행 모습(오른쪽).
충돌 에너지 흡수장치를 부착한 날개를 가진 곤충 모방 날갯짓 비행 로봇인 KU비틀(왼쪽)의 장애물 충돌 전후 비행 모습(오른쪽).이 과정에서 박 교수팀은 장수풍뎅이의 뒷날개가 처음 날갯짓으로 발생하는 공기력과 관성력으로 완전히 펼쳐지는 사실을 규명했다. 비행 중 장애물 충돌로 뒷날개가 접히더라도 날개 중앙부에서 충돌 에너지를 흡수해 짧은 시간에 다시 펼쳐 안정된 비행을 계속할 수 있다는 점도 입증했다. 이 원리를 적용해 날개에 충돌 에너지 흡수장치를 부착한 KU비틀을 개발한 것이다. 박 교수는 “장수풍뎅이 뒷날개를 모방해 날개의 앞부분에 충돌 에너지를 탄성 에너지로 저장할 수 있도록 초탄성 형상기억합금 선재(wire)와 경첩 구조로 구성된 충돌 에너지 흡수장치를 가진 날개를 개발했다”며 “이 날개는 바깥쪽이 날개 평면과 수직 방향으로 모두 접힐 수 있어 장애물과 충돌하면 초탄성 형상기억합금 선재가 경첩 구조를 중심으로 접히면서 충돌 에너지를 탄성 에너지로 저장한다”고 설명했다.
박 교수팀은 올해 곤충 모방 비행 로봇 관련 정부 연구개발(R&D) 과제가 종료될 예정이어서 저밀도 대기 비행과 같은 후속 연구를 위한 과제를 준비하고 있다. 박 교수는 “저밀도 대기 비행이 가능하고 좀 더 비행 효율이 높은 곤충 모방 비행 로봇에 대한 연구를 계속할 계획”이라며 활짝 웃었다.









