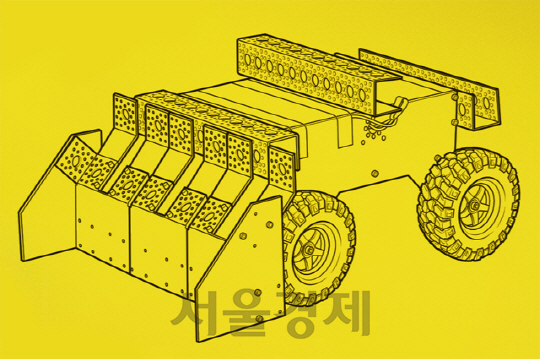
집 앞의 눈치우기는 이제 에티켓이 아닌 의무사항이 됐다. 하지만 의무가 됐다고 밤새 내린 눈을 치우는 일이 힘들지 않을 리 만무하다. 이럴 때 무선조종 제설로봇이 있다면 따뜻한 집안에서 손가락만 움직여서 마당과 정원, 집 앞의 도로를 말끔히 치울 수 있다. 제설에 충분한 힘을 갖춘 로봇을 만들려면 액토보틱스의 ‘워든 로봇 키트’를 본체로 사용하는 것이 좋다. 여기에 겔셀(gel-cell) 배터리와 전기 구동 모터, 그리고 3D 프린터로 인쇄한 삽날이 필요하다. 어떻게든 이 녀석을 완성하기만 한다면 눈과의 전쟁은 이미 이긴 것이나 다름없다.
제작시간: 24시간
제작비용: 389달러
난이도 ●●●○○
popsci.com/RCplow에서 사진과 배선도 등 자세한 제작법을 확인할 수 있다.
준비물
- 워든 로봇 키트
- 기어모터 보드 4개
- 20게이지 적색/흑색 집코드 3m
- 악어 클립 한 쌍
- 폴로루 TReX Jr 듀얼 모터 컨트롤러
- 온오프 토글스위치
- 30㎝ 서보 연장 케이블 2개
- 2채널 송수신 무선조종 시스템
- 30㎝ 수놈-수놈 JST 커넥터
- 기어모터 엔드캡(end cap) 4개
- 12.7㎝ 6-32 소켓 헤드캡(head cap) 나사 31개
- 6-32 나이록(nylock) 너트 31개
- 12V 5AH 젤셀 배터리
- 12V DC 500mAh 배터리 충전기
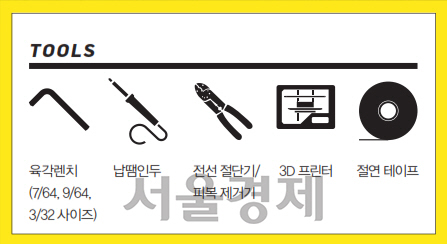
INSTRUCTIONS
1. 액토보틱스의 설명서에 따라 워든 로봇 키트를 만든다.
2. 기어모터 보드를 각 모터에 납땜 연결한다.
3. 집코드에서 적색 및 흑 색 전선을 분리한다. 흑색 악어 클립을 흑색 전선 끝에 납땜하고, 나머지 한쪽 끝은 피복을 벗겨내 TReX Jr의 GND 단자 속으로 넣는다.
4. 적색 전선의 길이를 반으로 자른다. 자른 전선의 한쪽 끝에 적색 악어 클립을 납땜하고, 반대편 끝을 전원 스위치에 연결한다. 나머지 적색 전선은 한쪽 끝을 스위치에 납땜하고, 반대편 끝은 피복을 벗겨내 TReX Jr의 12V 양극 단자 속으로 넣는다.
5. TReX Jr의 CH1, CH2 헤더에서 나온 서보 연장선을 각각 R/C 수신기의 CH2와 CH3 출력에 연결한다.
6. 각 JST 커넥터에서 한 세트의 플러그를 잘라낸다. 남은 JST 커넥터의 끝부분 피복을 벗기고, 기어모터 보드 안으로 연결한다. 후방 기어모터 보드는 극성을 바꾼다.
7. 왼쪽의 두 모터에 연결된 전선을 서로 꼬아서 연결한다. 적색은 적색에, 흑색은 흑색에 연결한다. 꼬아진 전선을 TReX Jr의 M1 단자 속으로 넣는다. 오른쪽 모터도 동일한 작업을 한 뒤 전선끝을 M2 단자 속에 넣는다.
8. popsci.com/RCplow에서 STL 파일을 다운받아 3D 프린터로 삽날 부품을 인쇄한다. 이를 소켓 헤드캡 나사와 나이록 너트를 이용해 앞범퍼와 결합한다.
9. 배터리를 충전하고, 전원 스위치를 뒷범퍼에 부착한다. 악어 클립을 배터리 단자에 끼운다.
10. 배터리와 전선, 전자장비를 로봇 키트에 넣고 방수 절연테이트로 모든 틈새를 봉한다. 스위치를 켜고, 각 모터의 속도 제어와 방향 제어가 이뤄지는지 확인한다. 이 모든 것을 끝내면 눈보다 인간이 강함을 보여주는 것만 남았다.
WARNING: 전기 계통에 물이 들어가지 못하도록 방수 테이프를 이용해 주요 구성품을 완벽히 밀봉해야 한다.
서울경제 파퓰러사이언스 편집팀